NTBOX4000 取扱説明書
重要:ご使用前に本マニュアルを必ずお読みください。
⚠️ 1. 安全上のご注意
本製品はインターネットに接続されます。初期設定済みのセキュリティ設定(ポート閉鎖、証明書認証)を変更して使用する場合、サイバー攻撃のリスクが高まります。原則として出荷時設定での運用を推奨します。
🔌 2. 設置と接続
配線の接続手順
- LTEアンテナおよびGNSSアンテナを対応する端子にしっかりと接続してください。
- CAN0とCAN1バスをそれぞれメインコネクタピン5~8に接続してください。
- CAN0: 車両CAN (500kbps等)
- CAN1: EV-CAN (500kbps等)
- 電源ケーブル(ACC, +B, GND)をそれぞれメインコネクタピン12~18に接続してください。
※ACC ONを検知するとシステムが自動的に起動します。
メインコネクタ ピン配置 (MX77A020HF1)
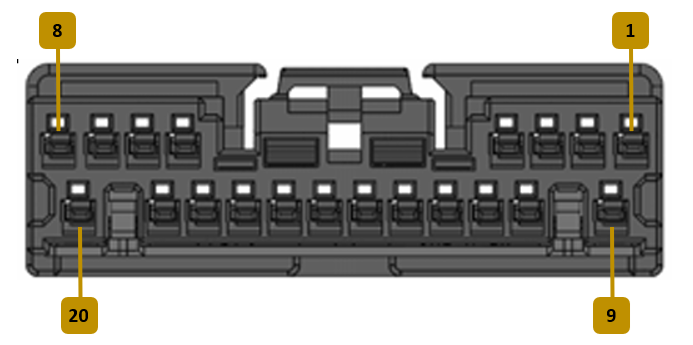
MX77A020HF1 コネクタ実物外観
| Pin | Signal | Notes | Pin | Signal | Notes |
|---|---|---|---|---|---|
| 1 | RS0_TxD | RS-232 TxD 出力 | 9 | GND | グランド |
| 2 | RS0_RxD | RS-232 RxD 入力 | |||
| 3 | RSVD1 | 拡張用信号 1 | 10 | RSVD2 | 拡張用信号 2 |
| 4 | RSVD3 | 拡張用信号 3 | 11 | RSVD4 | 拡張用信号 4 |
| 12 | GND | グランド | |||
| 13 | GND | グランド | |||
| 14 | GND | グランド | |||
| 15 | IV_BATT | バッテリ電源入力、常時 ON | |||
| 16 | IV_BATT | バッテリ電源入力、常時 ON | |||
| 17 | IV_BATT | バッテリ電源入力、常時 ON | |||
| 5 | CAN0_H | CAN Ch-0 High | 18 | IV_ACC | アクセサリー電源入力(Wakeup) |
| 6 | CAN0_L | CAN Ch-0 Low | 19 | <N.C.> | テストポイント TP1 にのみ接続 |
| 7 | CAN1_H | CAN Ch-1 High | |||
| 8 | CAN1_L | CAN Ch-1 Low | 20 | GND | グランド |
📡 3. 運用・保守
データ送信とログ保存機能
本製品は、車両データおよびGPS位置情報を以下の2系統で処理します。
走行データをAWS IoT Coreへリアルタイムに送信します。通信不安定時は自動再接続を行います。
詳細なログデータは内部ストレージにCSV形式で蓄積されます。車両のイグニッションOFF(スリープ移行)時に、蓄積されたデータは圧縮(ZIP)され、AWS S3へ自動的にアップロードされます。
車両リモート制御
クラウドからの指示を受信し、本製品を通じて車両のCANバスへ制御コマンドを送信することで、ドアの施錠・解錠や空調の事前起動など、車両の物理的なアクチュエータやECUを遠隔操作することが可能です。
遠隔保守・ソフトウェアアップデート(OTA)
本製品のファームウェアおよびアプリケーション(tbox-worker)の更新に加え、接続された各種ECU群のOTAアップデートが可能です。
また、ソフトウェアの更新だけでなく、車両の挙動やデータ取得間隔を決定する制御パラメータの遠隔チューニング(リモート変更)にも対応しています。アップデート通知はサポートサイトにて行われます。
♻️ 4. 廃棄と譲渡 (データ消去)
本製品を廃棄または第三者に譲渡する場合、内部に保存された機密データ(アプリケーション、証明書、生データ、圧縮データ等)を安全に消去(初期化)する必要があります。
手順:
保守用コンソール(SSH)より、以下のデータ消去スクリプトを実行し、完了後にシステムを再起動してください。
$ sudo reboot
※注意:この操作によりアプリケーション、クラウド接続用証明書及びログデータが完全に削除され、復元できなくなります。
(OSのコアシステムやファームウェアバージョンは退行せず維持されます)
📜 5. 免責事項・サポート
推奨されるセキュリティアップデートを適用せずに運用した場合の事故やデータ漏洩については、当社は一切の責任を負いません。